The Complete Boeing Project
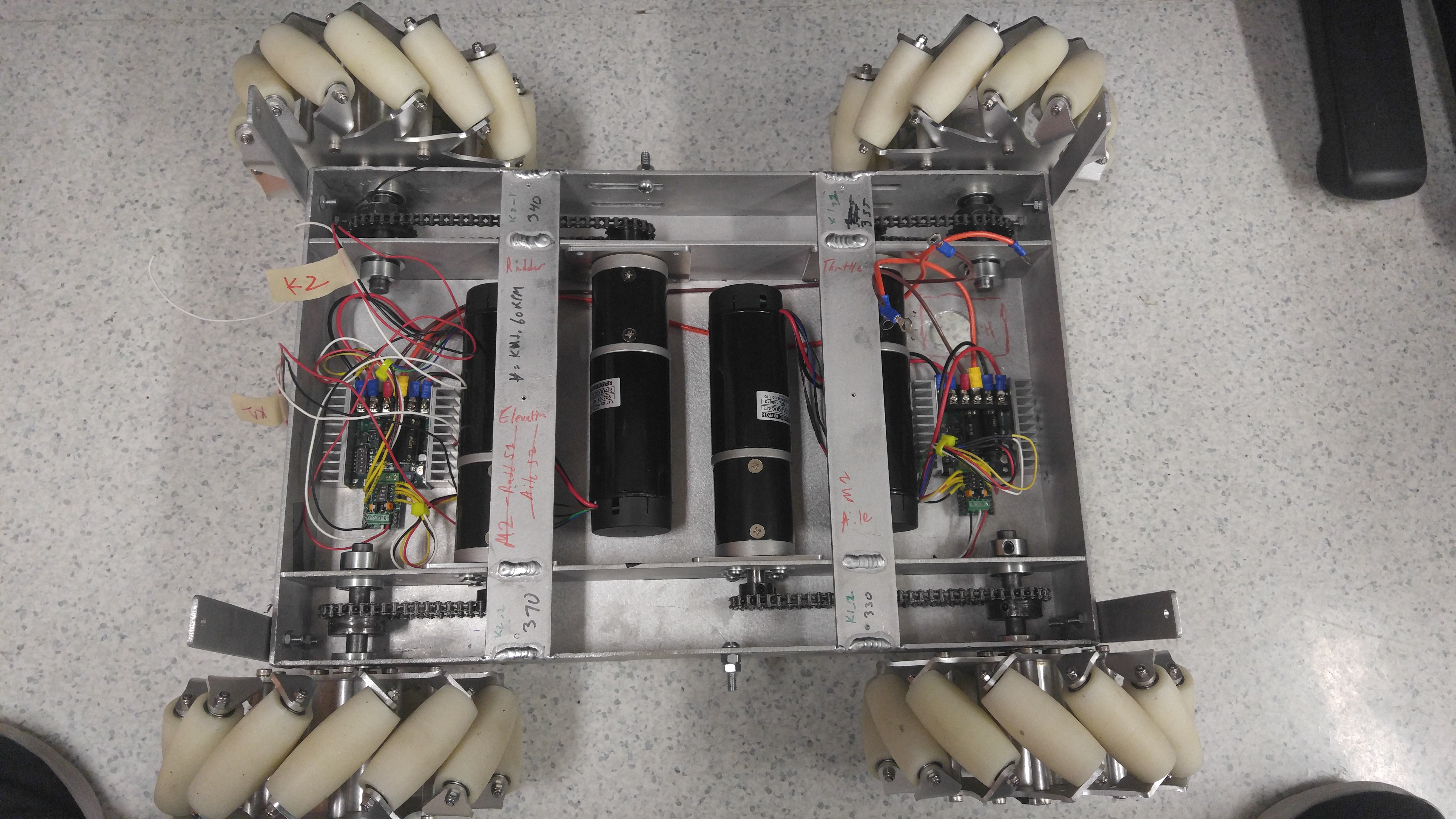
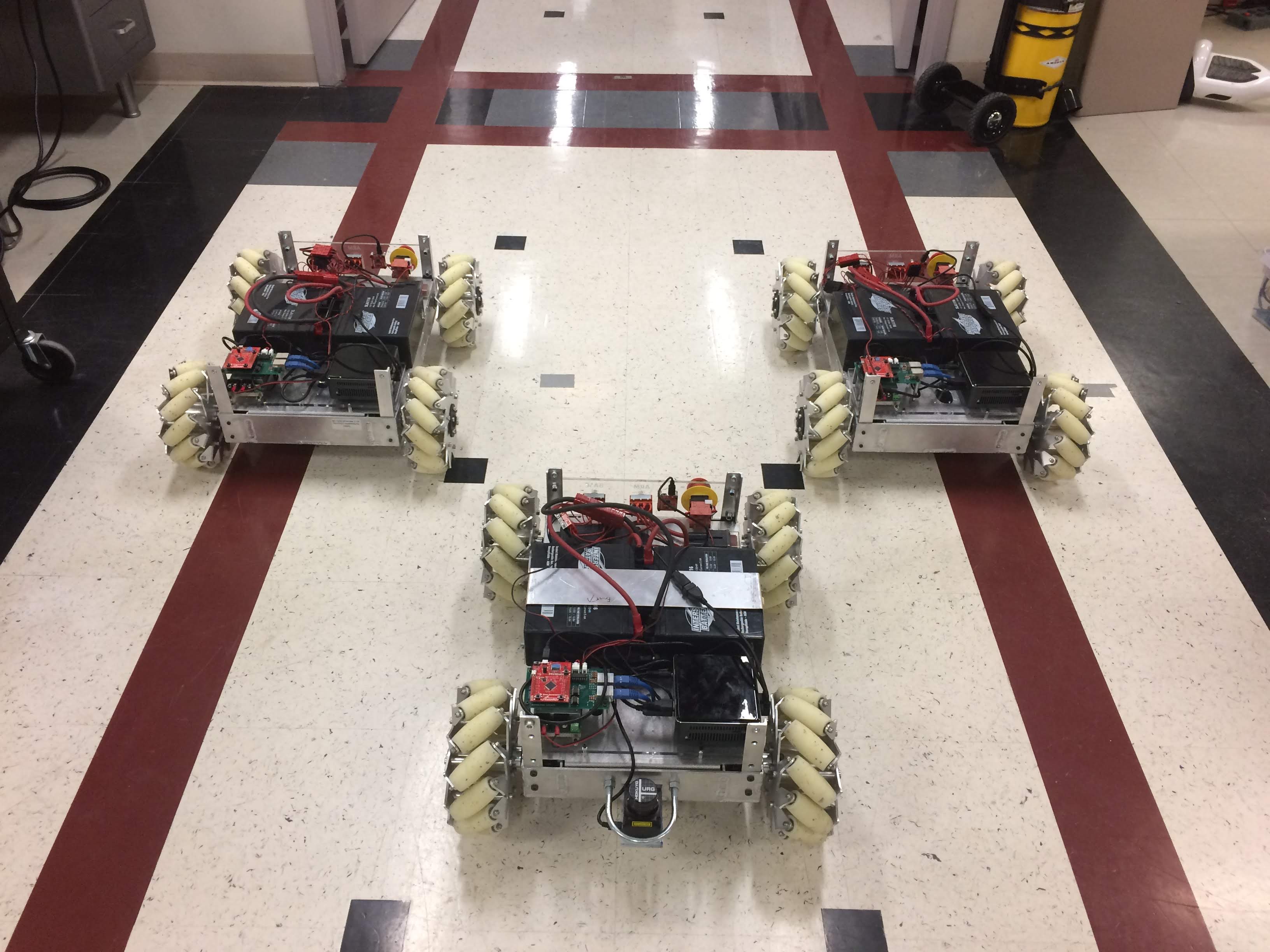
A continuation from Part I below, this quarter brought forth a complete redesign of the Omni robot base. Instead of using the Arduino Mega microcontroller and Kangaroo motion controllers, we have switched over to the Tiva C Series microcontroller from National Instruments. Thus, the architecture of the base is exactly the same as the inverted delta robotic arm that will sit ontop of it - creating a more robust sytem. The goal of this quarter was to build and program three of these robots while making sure throughout the process that the calculated odometry was as accurate as possible. Finally, instead of controlling each robot individually, we were tasked to control them formation style - where the user controls the velocity of a 'pivot' point and the robots move relative to that point.